
Revised 2 July 2023
Accepted 20 October 2023
Available Online 29 November 2023
- DOI
- https://doi.org/10.55060/s.atmps.231115.003
- Keywords
- Analytic representation
Möbius-Listing bodies
Möbius phenomenon - Abstract
Generalized Möbius-Listing surfaces and bodies generalize Möbius bands, and this research was motivated originally by solutions of boundary value problems. Analogous to cutting of the original Möbius band, for this class of surfaces and bodies, results have been obtained when cutting such bodies or surfaces. In general, cutting leads to interlinked and intertwined different surfaces or bodies, resulting in very complex systems. However, under certain conditions, the result of cutting can be a single surface or body, which reduces complexity considerably. These conditions are based on congruence and rotational symmetry of the resulting cross sections after cutting, and on the knife cutting the origin.
- Copyright
- © 2023 The Authors. Published by Athena International Publishing B.V.
- Open Access
- This is an open access article distributed under the CC BY-NC 4.0 license (https://creativecommons.org/licenses/by-nc/4.0/).
1. INTRODUCTION
The notion of Generalized Möbius-Listing Surfaces and Bodies GML was pioneered by the second author, in collaboration with Paolo Emilio Ricci and joined by the first author from 2010 [1,2,3,4]. The motivation arose from a clever remark by the famous Russian mathematician Olga A. Oleinik, who observed that the solutions of BVP for partial differential equations strongly depend on the topological properties of the domain in which the problem is considered. A second motivation was to decompose complex movements into simple movements, following the original idea of Gaspar Monge in the late 18th, early 19th century.
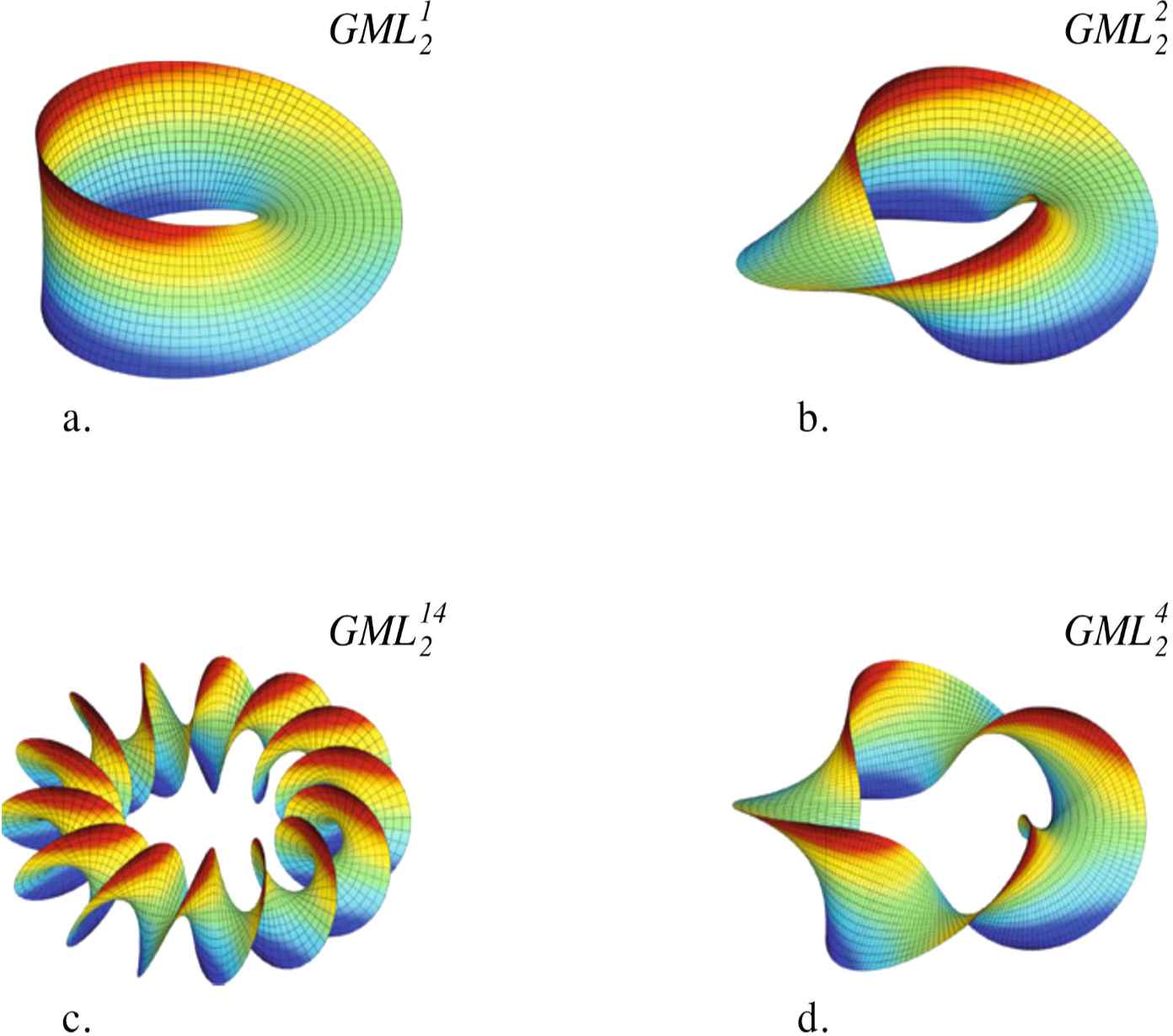
GML’s generalize the Möbius band or ribbon in a geometrical way: both the basic line and the cross section can be chosen from a wide range of shapes, compared, in the case of the classical Möbius band, to the circle as central basic line and a piece of line perpendicular to the basic line; moreover, the basic line cuts the piece of line exactly in the middle (Fig. 1a).
Ribbons with twists before joining. Case a (top left) is the classic Möbius strip.
Fig. 1 shows how a ribbon can be connected, with an odd or even number of twists (the upper index). In case the number of twists is odd, the surface is called non-orientable, and the surface is one-sided. In other words, a traveler moving on the Möbius band will return at his or her original position and will have visited all parts of the ribbon (“Möbius condition”). In contrast, when the number of twists is even, then the surfaces will be like a cylinder, with an inner and an outer surface (“Cylinder condition”). A traveler starting on one side will return on the same side, and not see the other side.
Instead of starting from a ribbon,
(a-e) Identification of vertices, with twists leading to torus
Conceptually
- •
the analytic definition of
- •
the process of cutting and its general solution;
- •
the conditions under which a single body or surface results after cutting;
- •
the wide applicability.
2. ANALYTIC DEFINITION
Generalized Möbius-Listing Bodies
The functions
- •
Shape of the cross section
- •
Shape of the basic line: the trajectory that the central point of the cross section follows before closing.
- •
The number of twists
- •
Translation of the body in 3D space
- •
In the case of closed GML bodies, the function Q(θ,t) is 2π-periodic or equal to 0.
Some remarks:
This baseline and the cross section can be a circle, Gielis curve, polygon, …, even a self-intersecting curve (Fig. 3a).
- •
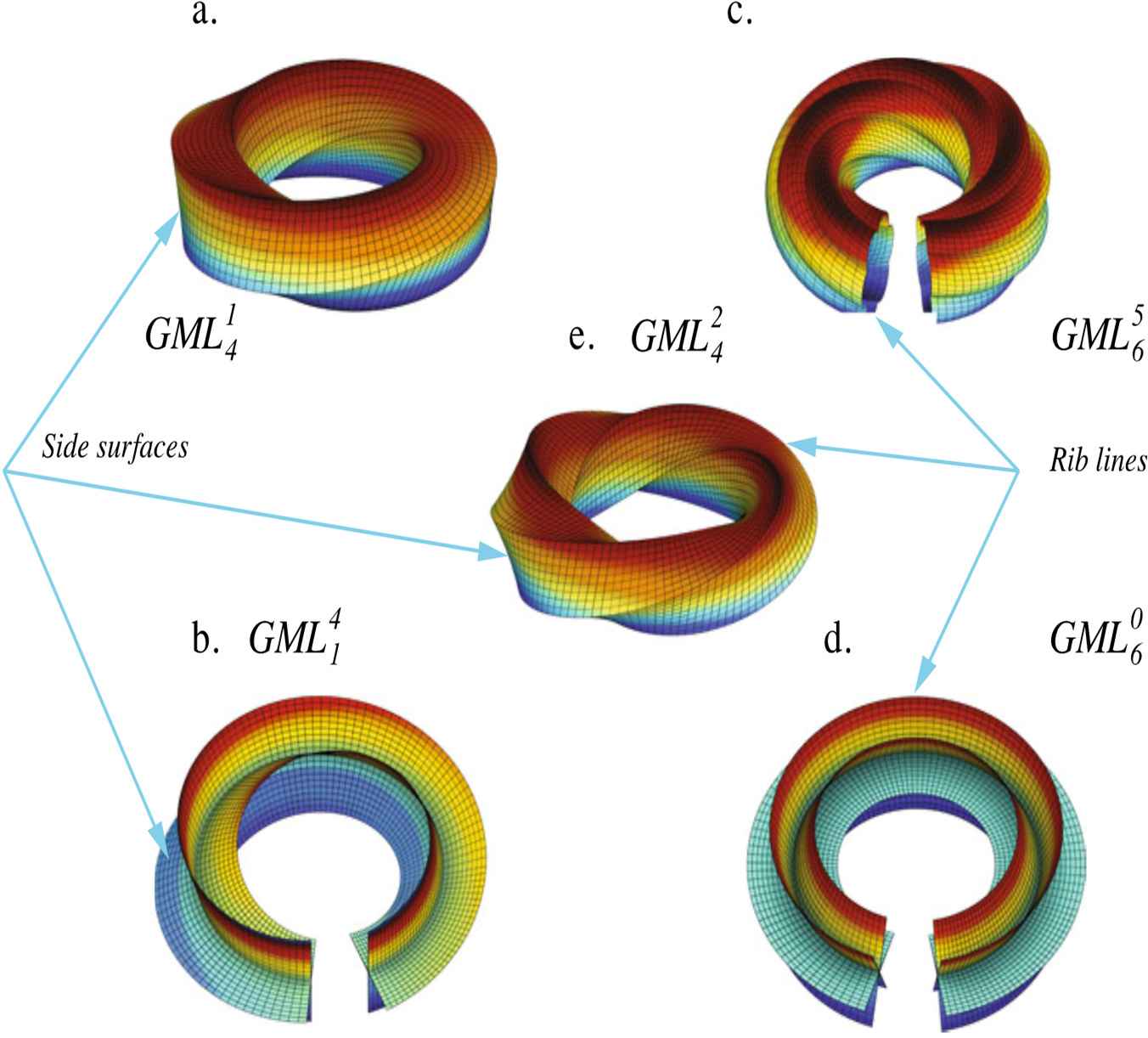
If the cross section is a curve, then the resulting shapes will be a GML surface (hollow), but if also the area inside the curve is included, the resulting shapes will be a GML body (solid). Obviously, one can also think of shells, i.e. GML bodies with an outer thickness and the innermost part hollow, like a bamboo culm.
- •
In [5], the problem of how many different hollow bodies results when the cross sections are Grandi curves, also known as rose curves, defined by the control parameters
- •
- •
With this analytic representation, complex movements can be studied and decomposed into simple ones, allowing for the study of this class of surfaces and bodies from a kinematic point of view. However, the same parameterizations also lend themselves to dynamic studies, with changing cross sections in time (hence the parameter t).
- •
Other analytic representations exist [6], but this one is the simplest.
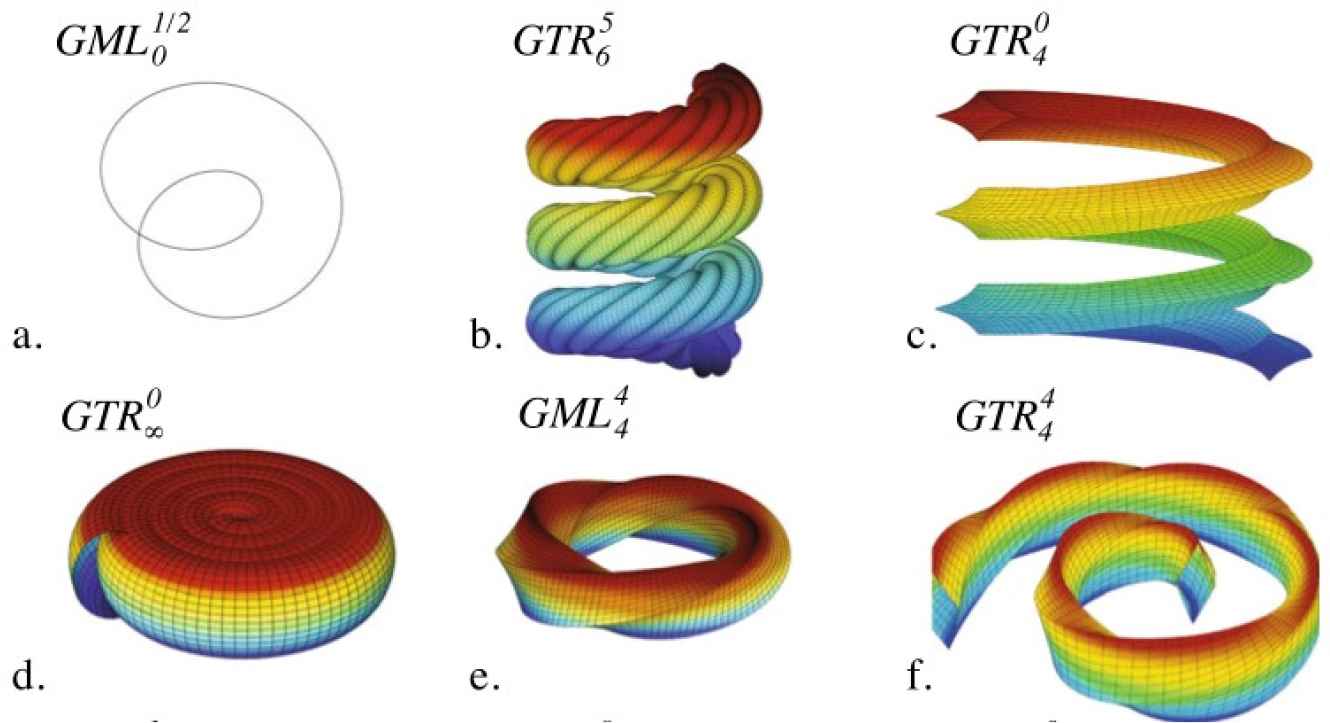
GML and GTR surfaces.
3. THE CUTTING PROBLEM
The original motivation to study
To address this problem, the idea was to study cutting the
When dealing with GML surfaces and bodies, more objects can result after cutting. Depending on the where precisely the knife cuts (through the center of the polygon or not; from vertex to vertex; from side to side, or from vertex to side, and on the m and the number of twists of the
A GML body with pentagonal cross section and resulting structures after cutting.
The general solution was found when the whole problem could be reduced to pure planar geometry. Instead of using a fixed knife to cut the fixed GML surface or body, the knife can be fixed and the GML moves. It is described in [8], but the inspiration was machinery for cutting bamboo poles [9].
Remarks:
- •
The choice for cutting is to be understood in a broad sense. It is about separation of different domains within larger domains when these are subject to stresses.
- •
When a prism is subject to torsion, the cross sections will not remain planar (they will remain planar for a rod with circular cross section). Part of the section will be forced upward, other parts downwards. But the “nodal line”, which remains in plane, separates the two. Fig. 5 shows an example by Saint-Venant who discovered this (Fig. 5a, Fig. 5b) and D’Arcy Thompson’s plaster cast of horns or rams (Fig. 5c). Similar for vibrations. In Chladni plates, sand gathers where stress and deformation are zero, at the nodal lines (Fig. 5d).
- •
Whether we speak of drawing lines to connect points and separate subdomains, using knives to cut bodies or m-polygons, considering paths at 1000 m of height as the only way to avoid falling into volcano craters, they are all the same.
- •
The problem and its solution also generalized many other classic problems in geometry studied by Euler, Catalan, Lamé, Cayley and many others [9].
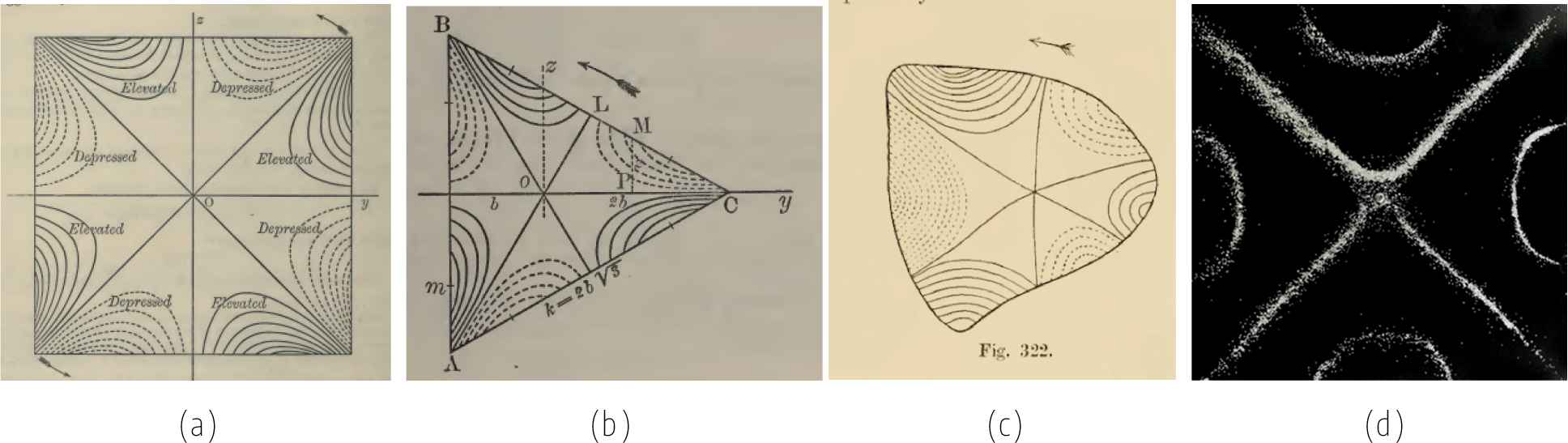
Torsion of prisms with square (a) and triangular (b) cross sections. Dotted lines are depressed regions and full lines are elevated parts of the cross sections. (c) Anticlastic surfaces in the horns of rams. (d) Example of Chladni plate.
4. HOW TO OBTAIN A SINGLE SURFACE OR BODY AFTER CUTTING
In studying the cutting problems, very complex structures can result, but under certain conditions, a single body will result. This is similar to the classic Möbius band: when cut along the central line, the result is a single one-sided ribbon. In GML it was found that the same results can be obtained when cutting the polygon through the center for m even.
But a twist is necessary. Fig. 6 shows all possible results after cutting an untwisted and a twisted square torus. Here
Cutting of
Hence we find that conditions must exist under which the whole structure does not divide into different pieces, but ultimately remains one connected structure. And this structure displays the Möbius phenomenon (as opposed to the Cylinder phenomenon). Given that the cross section can change over time (or along the length of the basic line), the cross sections can become very complicated. But still, the overall result will be a single body under the appropriate conditions.
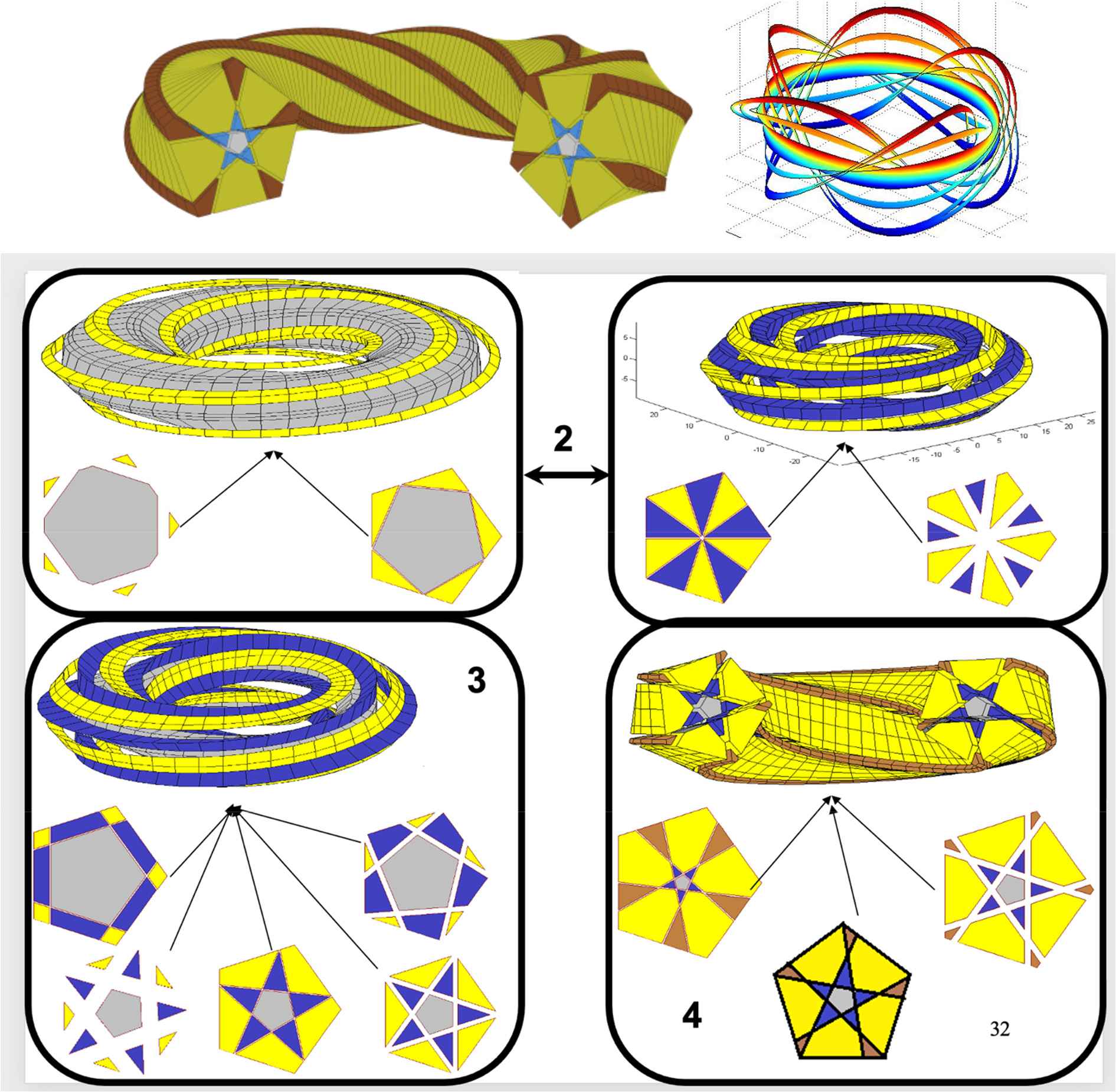
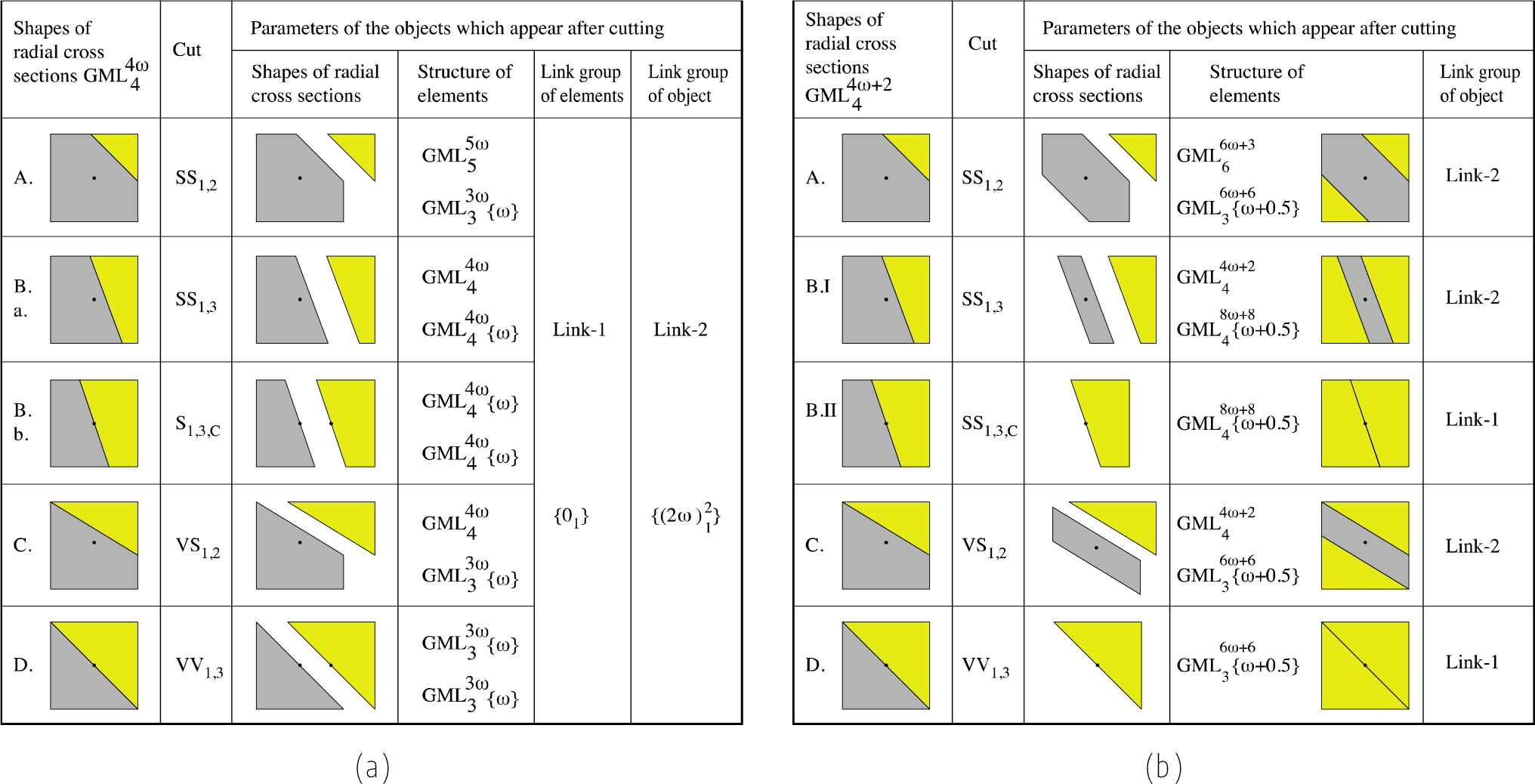
The next challenge was then to find these conditions. With the process of cutting described above, with a knife cutting from side to side, vertex to vertex or side to vertex, it turned out that a single body could only be obtained for polygons with even number of vertices and edges, and only when the cut was through the center (cases B.II and D in Fig. 6b). It did not work if the cut was not through the center (Cases A, B.I and C in Fig. 6b).
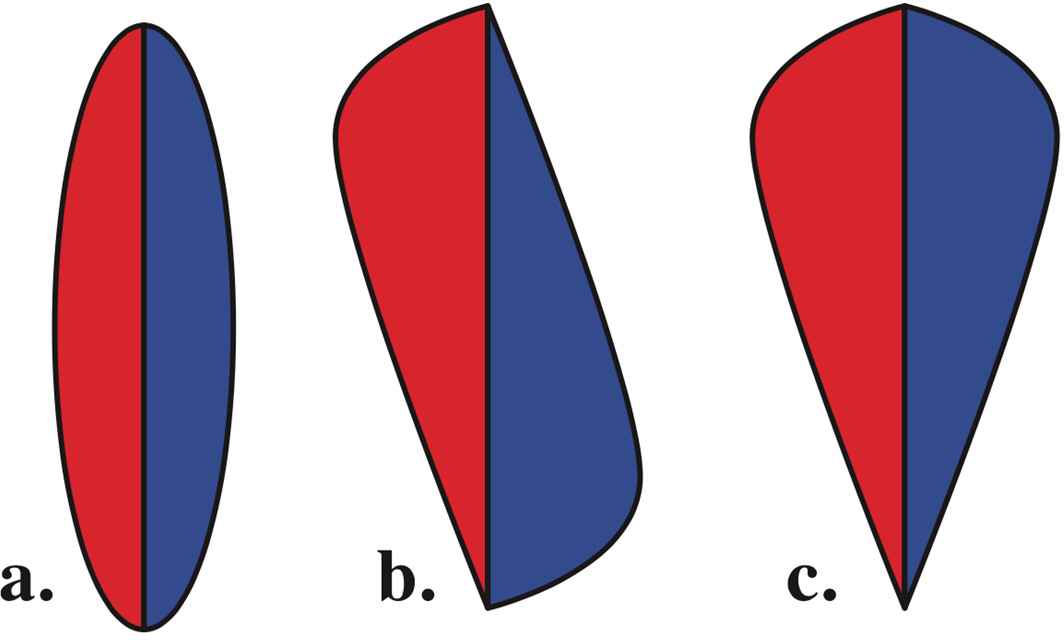
The difference between B.II and D on the one hand and case C on the other, is that the resulting shapes of the former (the grey and yellow) are congruent, and they can be rotated around the center, so that the yellow completely overlaps the grey after rotation around the center. Hence, congruence is key, but this is not possible at all, when the number of sides and edges is odd (triangles, pentagons or heptagons). Moreover, this rotational symmetry condition is met in Fig. 7a and Fig. 7b, but not in Fig. 7c. So, if the shape has cross section c., then the single body phenomenon is not possible either. Thus, it is also not general for m even.
Two angular bodies cut through the center.
This problem was solved using radial knives, which cut only from center to boundary, not the whole way through like the previous knives. But if one completes the cutting along the whole structure until the radial knife returns to its original position, then the single-sided Link-1 Möbius phenomenon is possible also for polygons with odd number of vertices and sides. This time the idea of using a radial knife was inspired by sawing wood. Details are found in [8], but Fig. 8 shows how congruence by rotation is achieved by radial knives in (b) and (d), but not with the cross-cutting knives in (a) and (c). Here the dark and light blue sectors are mirrored, not congruent by simple rotation.

Vertex-to-side and side-to-side cuts through the origin in a triangle, with chordal (a,c) or radial (b,d) knives.
5. A SINGLE CROSS SECTION WITH THE RIGHT SYMMETRY SUFFICES
The cross section can change over time (
The simple answer is that a single cross section is sufficient. The cross section of the rest of the GML body can be point clouds or the wildest asymmetrical shapes you can imagine, but as long as the cutting process starts with one cross section fulfilling the conditions (which is obviously then also the end cross section), that is fine [10].
Fig. 9 illustrates this, as an old carousel slide tray, but with a twist. If we start with one cross section having the right conditions for cutting (which will also be the end condition), then all of the other cross sections can be anything. If this is a simple hexagon with uniform color, the rest can be anything inside the hexagonal boundary (in the case the size of the cross section remains the same along the structure, we speak of area conservation). But these cross sections can be anything. It does not matter. For example, if the starting section is a hexagon with a nice symmetrical figure, then this figure can be torn into pieces, or into point clouds which may reach to the end of the universe, but when the knife reaches its final destination (i.e. the symmetrical shape at the starting position), the whole structure turns out to be one simple connected body.
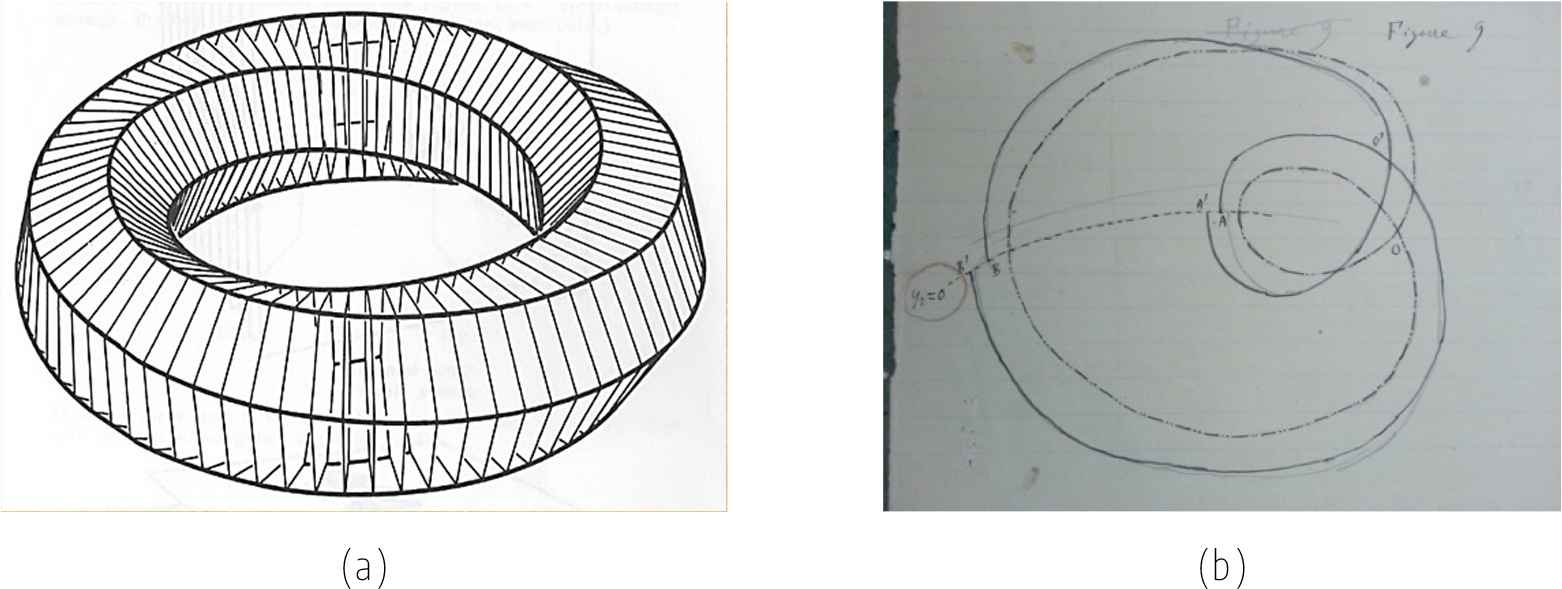
Left: fiber bundle. Right: Poincaré’s drawing.
Fig. 9a is from a book by J. Weeks, The Shape of Space, illustrating fiber bundles in differential geometry. This gives an idea of how far our GML results can extend. One aspect of dynamical systems that is particularly relevant is Poincaré’s Recurrence Theorem. In many physical and mathematical cases conservation of area (or volume) is crucial. In Fig. 9a, all sections have the same area, but what the hexagons contain can be very different. One example with area (or volume) conservation is Poincaré’s Recurrence Theorem, which states that under certain conditions any dynamical system will return arbitrarily close to its initial state after a certain time (Fig. 9b). More precisely, Poincaré proved that in certain systems almost all trajectories return arbitrarily close to their initial position infinitely often. What exactly the intermediate trajectories are is less important.
Arnold’s Cat is the most famous illustration of the phenomenon. Starting with the image of a cat, and performing an area preserving transformation eventually, after a specific number of discrete steps, the image of the cat completely reappears, and will continue to do so, infinitely. The transformation tears up the image, but maps it back to fit the original square in every step, hence it is area-preserving. This can be done with other shapes as well, e.g. plant leaves [11]. Obviously, in a
6. FUTURE PROSPECTS
There are a number of applications in science and technology. They can be models for a wide range of complex phenomena, but then, first and foremost, it is necessary to understand the geometry of
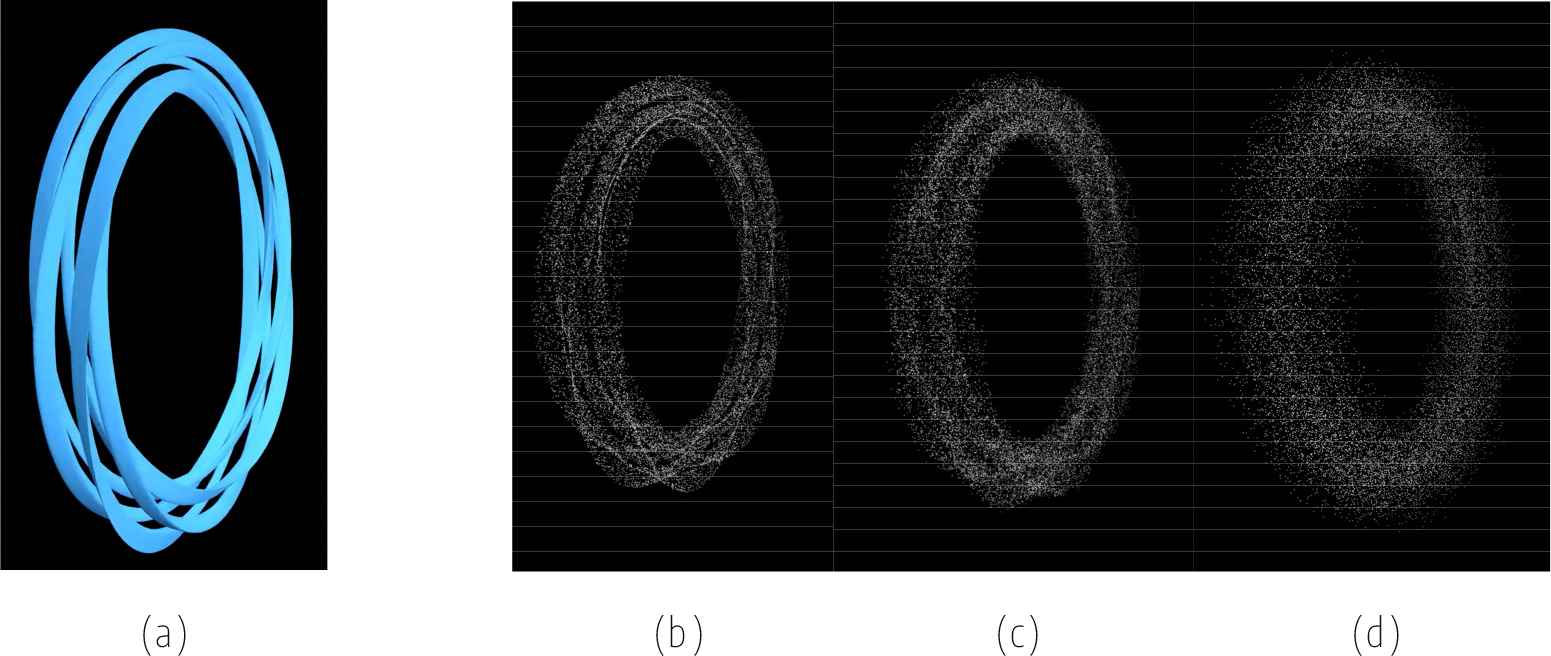
(a)
It will depend on the accuracy of the measurement, whether such structures can be observed. With decreasing measurement precision and no knowledge about
REFERENCES
Cite This Article
TY - CONF AU - Johan Gielis AU - Ilia Tavkhelidze PY - 2023 DA - 2023/11/29 TI - A Note on Generalized Möbius-Listing Bodies BT - Proceedings of the 1st International Symposium on Square Bamboos and the Geometree (ISSBG 2022) PB - Athena Publishing SP - 31 EP - 39 SN - 2949-9429 UR - https://doi.org/10.55060/s.atmps.231115.003 DO - https://doi.org/10.55060/s.atmps.231115.003 ID - Gielis2023 ER -


